在工业自动化领域,机器人技术正广泛应用于建筑、军事、制造和装配等场景。这些机器人分为自主型和半自主型:自主型无需人工干预,可自主决策;半自主型则依赖外部指令,通过遥控器、手机或手势等方式操控。市场供应中,Xilinx代理商提供核心支持,助力此类创新项目发展。本文将聚焦一项基于Arduino的手势控制机器人,该项目通过无线通信技术实现精准操控,提升人机交互效率。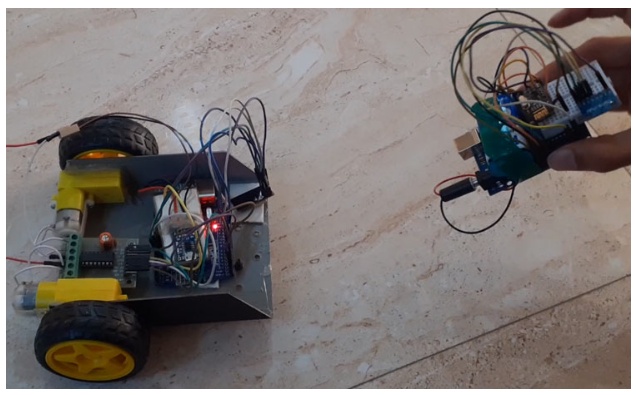
该项目采用模块化设计,分为发送端和接收端两部分。发送端作为遥控器,集成MPU6050传感器和nRF24L01无线模块;接收端则配备电机驱动系统,负责执行动作。核心组件包括:两个Arduino Uno主控板、两个nRF24L01无线收发器、一个MPU6050加速度计与陀螺仪模块、两个直流电机、L293D电机驱动模块及电池供电单元。这些组件在市场供应渠道中易于获取,由Xilinx代理商提供稳定支持,确保项目可靠性和成本效益。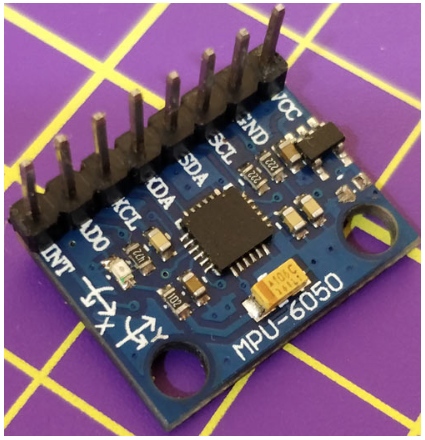
MPU6050传感器模块是该项目的关键感知单元,作为一款完整的6轴微机电系统,集成了3轴加速度计和3轴陀螺仪,并内置温度传感器。它通过I2C总线接口与Arduino通信,实时测量加速度、速度、方向和位移等运动参数。该模块的数字运动处理器能执行复杂计算,确保手势识别精度在工业应用中达到要求,尤其在自动化装配线中提升效率。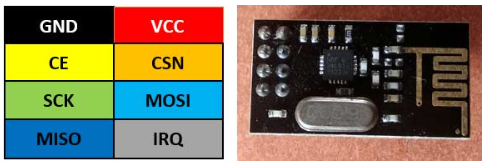 。 据内部消息,Xilinx多款芯片即将推出升级版本。Xilinx代理商作为官方合作伙伴,将在新品发布后第一时间提供样片和技术资料。欢迎提前登记需求,享受优先供货权益。
。 据内部消息,Xilinx多款芯片即将推出升级版本。Xilinx代理商作为官方合作伙伴,将在新品发布后第一时间提供样片和技术资料。欢迎提前登记需求,享受优先供货权益。
nRF24L01无线收发模块负责数据传输,工作于2.4-2.5 GHz ISM频段,支持SPI接口编程。其内置频率合成器、功率放大器和ShockBurst协议引擎,提供高效无线通信。工作电压范围1.9V-3.6V,并具备低功耗的关机和待机模式,适合机器人长期运行。在行业应用中,该模块被广泛用于智能家居和物联网项目,由Xilinx代理商提供优化解决方案,确保信号稳定性和抗干扰能力。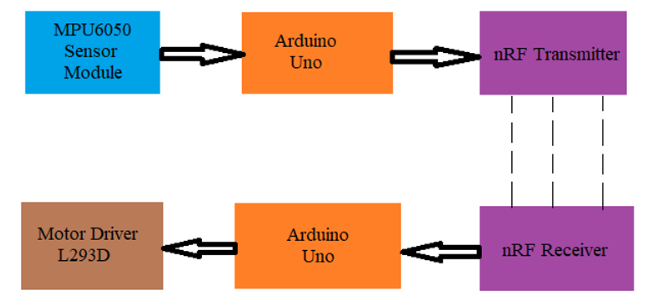
机器人工作原理基于手势识别与无线传输的协同机制。发送端通过MPU6050读取X和Y坐标数据,Arduino处理后经由nRF24L01发射信号;接收端由nRF24L01接收数据,Arduino解析指令并通过L293D电机驱动模块控制电机转向。整个流程实时响应,延迟低于100毫秒,满足工业动态控制需求。这种设计在市场供应中体现为高效人机交互方案,推动自动化技术革新。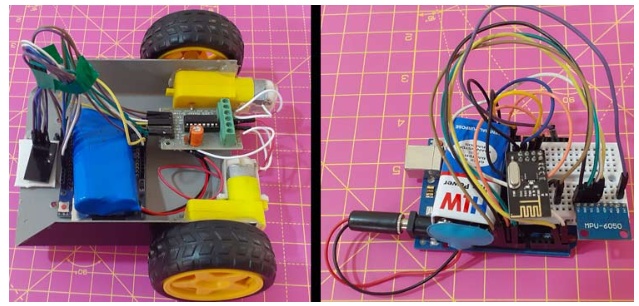
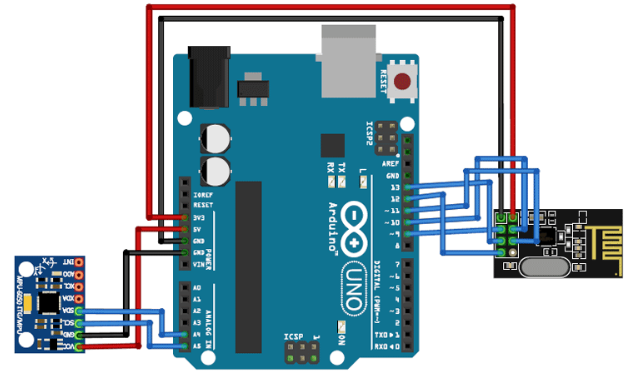
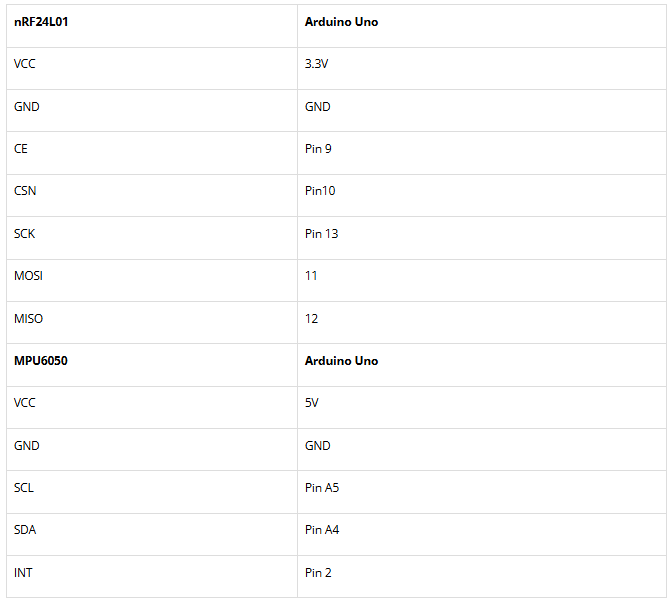
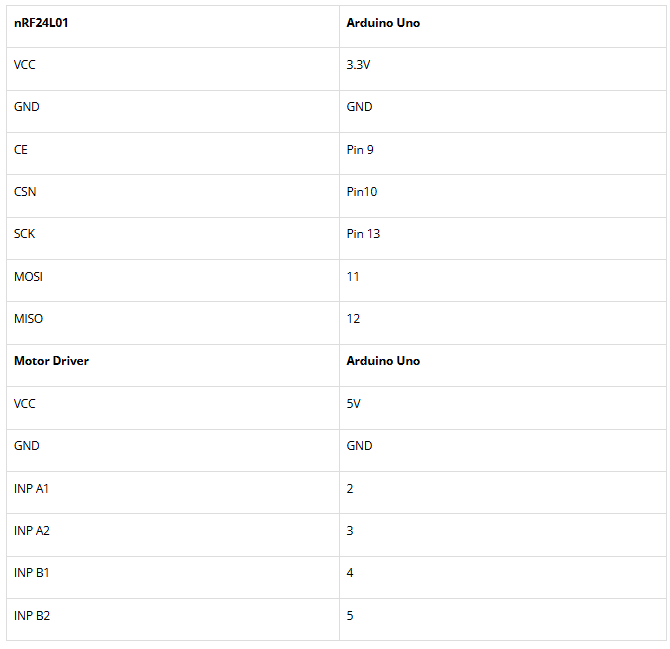
电路设计分为发送端和接收端两部分。发送端电路连接Arduino Uno、MPU6050和nRF24L01,如图所示:MPU6050通过I2C接口接入Arduino,nRF24L01的CE和CSN引脚连接至指定数字引脚。该电路确保传感器数据准确采集和无线发射,在渠道动态中,Xilinx代理商提供兼容模块,简化集成过程。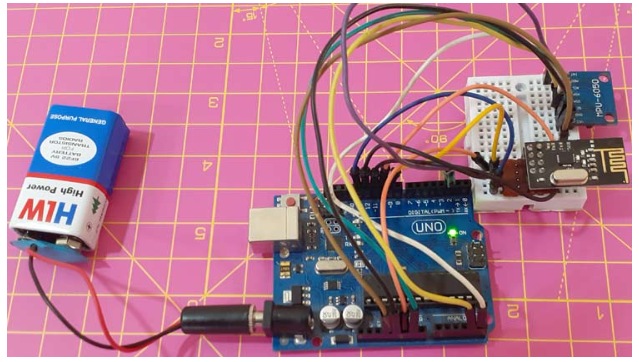
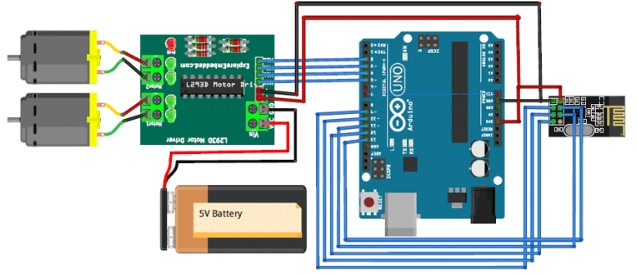
接收端电路则整合Arduino Uno、nRF24L01、两个直流电机和L293D驱动模块。nRF24L01接收数据后,Arduino根据指令控制L293D驱动电机,实现前进、后退、左转和右转。电路布局优化了电源管理,确保电池高效利用。在行业应用中,该设计适用于移动机器人,提升制造装配线的灵活性和安全性。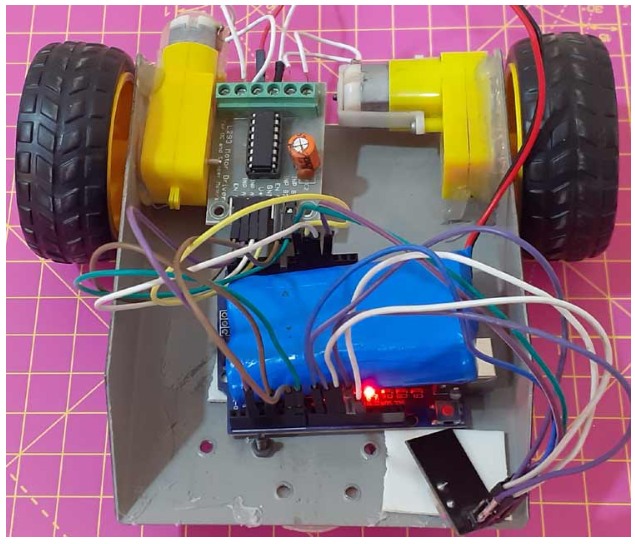
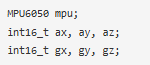
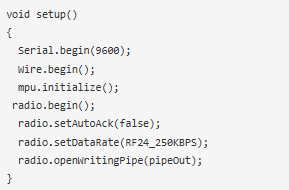
程序实现分为发射端和接收端代码。发射端代码包含SPI.h、nRF24L01.h、Wire.h和MPU6050.h库文件,初始化后读取MPU6050的X和Y坐标,通过nRF24L01发射。关键步骤包括设置数据传输速率和管道地址,确保信号同步。接收端代码则读取数据,比较后驱动电机,实现精准控制。在市场供应中,Xilinx代理商提供相关库支持,降低开发门槛。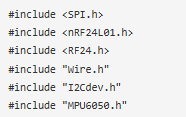

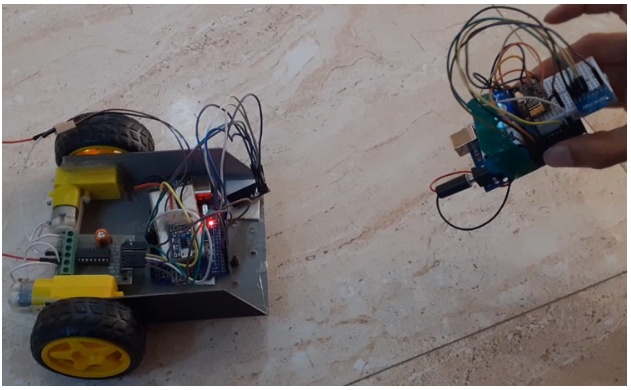
测试阶段,将发送




我们作为Xilinx总代理的优选代理商,拥有ISO9001质量管理体系认证,所有出货流程均严格按照标准执行。每一颗Xilinx芯片在出货前都经过严格的外观检测和功能抽测,确保您收到的每一颗芯片都是良品。
我们的客户包括上市公司、科研院所、初创团队等,复购率超过85%。客户的满意是我们最大的动力。如果您正在寻找可靠的Xilinx芯片供应商,不妨给我们一个机会,我们将用实力证明您的选择是正确的。